| Multiparametric Processing |
|---|
| Introduction |
|---|
| CRS Stack | ||
|---|---|---|
 |
 |
|
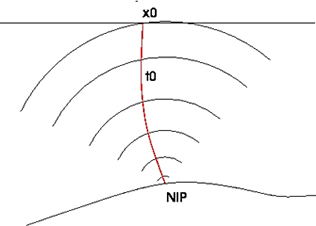
| Figure 1. Normal Incidence Point (NIP) wave front produced by a point source. |
Figure 2. Normal (N) wave front produced by a exploding reflector experiment. |
|
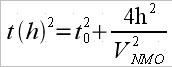
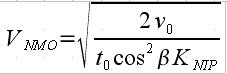
| CRS Versus NMO Traveltime | ||
|---|---|---|

| CRS Benefits | ||
|---|---|---|
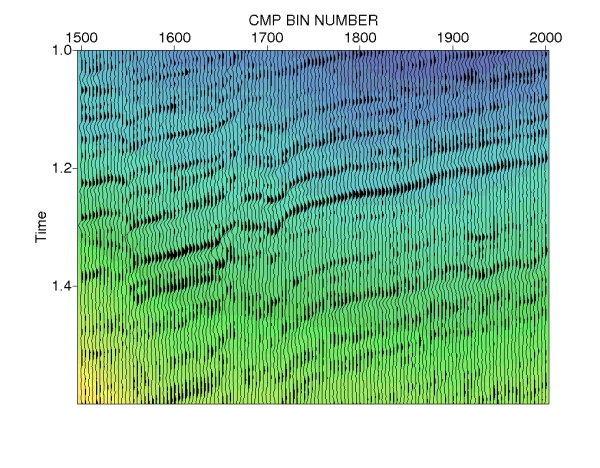
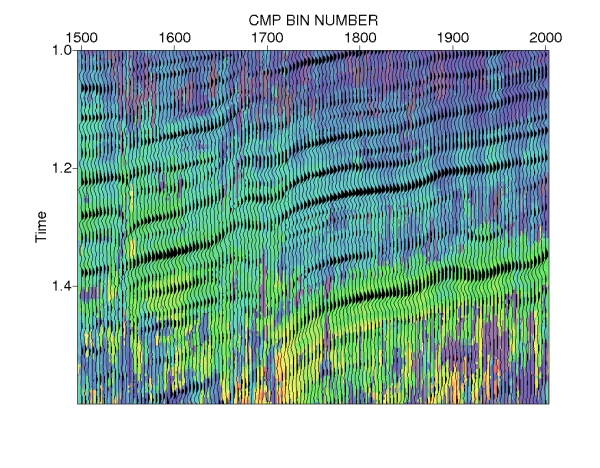
| Example 1: NMO/MPT stack comparison (Land dataset) | ||
|---|---|---|
 |
 |
|
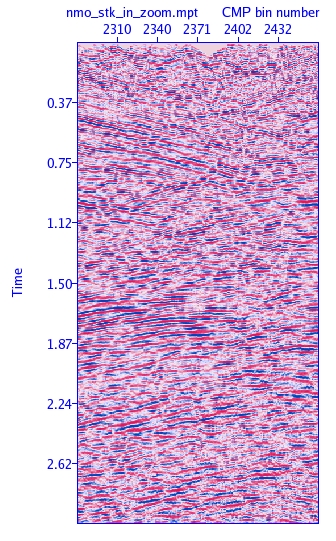
Figure e1.1: Conventional NMO stack. |
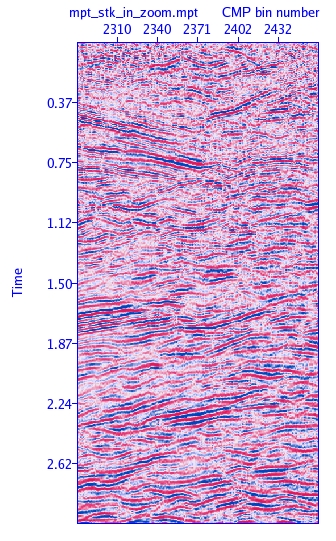
Figure e1.2: Multiparametric stack. |
|
|
Contact Information |
||
|---|---|---|